





Do You Need Help? Here Us : 電話番号 : +86 595 22486398
Do You Need Help? Here Us : 電話番号 : +86 595 22486398
ショック! 2つの新機能を追加した新型電動ショベル
August 30, 2024
掘削機は、鉱業および建設業界で最も重要な機械の 1 つです。現在、化石燃料は掘削機に必要なエネルギーのほとんどを供給しています。このエネルギーは環境に有害であるため、電動ショベルの機能開発は特に重要です。特に油圧ショベルは、動いていないときでも多くのエネルギーを消費します。さらに、油圧ショベル システムのホースとバルブはエネルギーを浪費するため、研究者は電動リニア アクチュエータの適用を検討しています。これらのアクチュエータは通常、電気モーターと一連のボールネジ (親ネジ) によって駆動されます。これらのアクチュエータは、停止時にエネルギーを放散しながら大きな軸応力に耐える必要があります。
掘削機での電動アクチュエータの使用については、広範な研究が行われています。採掘掘削機用の電気駆動および制御システムの設計と実装において、DCモータとトランジスタパワーセンサを利用し、消費電力を20%~30%削減することを目標とする採掘掘削機用の新しいメカトロニクスシステムを提案します。さらに、掘削機のアクチュエータにかかる動的負荷を軽減する際に、研究者らは追加の弾性減衰装置を掘削機の動作スキームに組み込むことで、掘削機の電動アクチュエータにかかる負荷を軽減することを目指しました。
電動アクチュエータのバックドライブ能力が低いため、当社はこの機能を備えた電動ショベルを開発することになりました。ただし、電動アクチュエータは通常、油圧アクチュエータよりも小さな力を生成します。したがって、これらのアクチュエータを使用する掘削機は、バケット先端に同じ外部荷重がかかってもアクチュエータがより軽い荷重に耐えられるように、異なる設計を行う必要があります。この設計により、電動ショベルの耐荷重を向上させることができます。同時に、アクチュエータの負荷を軽減することで、エネルギー消費を削減できます。
1. 電動ショベルの設計・製作
本研究では、リニアスクリューアクチュエータを利用した電気ショベルの新しい設計を提案し、その低い後退駆動能力を利用してアイドル期間中のエネルギーを節約し、油圧アクチュエータよりも低い負荷容量を有する。具体的には、新しい設計におけるリニア アクチュエータの並列配置は、リニア アクチュエータ全体の負荷分散を軽減することを目的としています (図 1)。

図 1. 製作された掘削機と試験装置
掘削機に取り付けられている最初の 3 つのアクチュエータは、ブーム、ブーム、バケットの動作用の電動リニア アクチュエータ (図 2) であり、4 番目のアクチュエータは旋回動作を制御するギア付きロータリー DC モータです。電気リニア アクチュエータの回転 DC モーターは、一連のプーリーとベルトを介してリード スクリューに接続されています。モーターは回転ポテンショメータにも接続されており、アクチュエータの長さに関するフィードバックが提供されます。また、この掘削機のリニアアクチュエータは電力源として系統に接続されています。
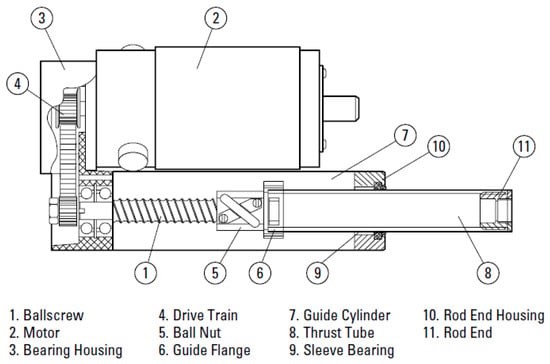
図 2. リニア電動アクチュエータのコンポーネント
選択したリニア アクチュエータの動的負荷容量は 2000 N、移動速度は 20 mm/s です。 2 つの巨大な引張スプリングの助けを借りて、ブームリンクを持ち上げることができます (図 3)。このスプリングの最大荷重は70kgfです。掘削機’構造は、レーザーカットされた 2D アルミニウム シートとステンレス鋼で作られています。掘削機’ブームとブームはアルミニウム製で、M12 ボルトを使用して組み立てられます。
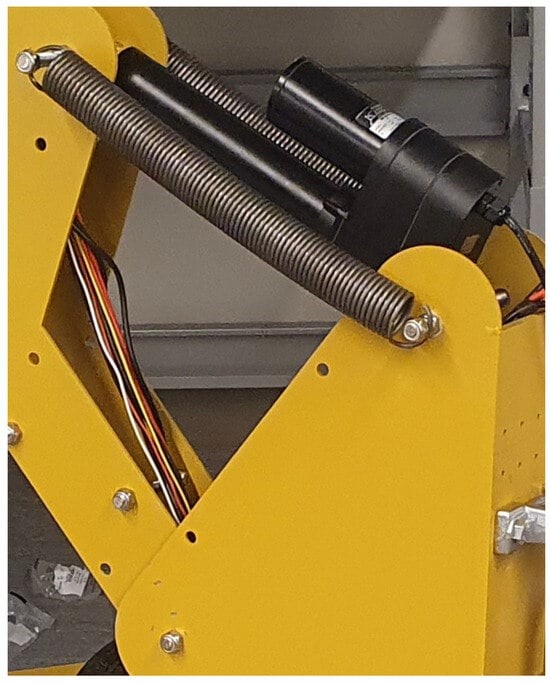
図 3 . 2 つの巨大なバネがブーム アクチュエータがロボット ハンドを持ち上げるのを助けます
切断された4本の鋼管と下の鋼板を溶接して掘削機の底部フレームを形成します(図4)。この構造には、移動を容易にするために 4 つの非アクティブな車輪が付いています。次に、掘削機のマニピュレータ (図 5) が 2 つの頑丈なベアリングを使用して下部フレームに取り付けられます。

図 4 掘削機の下部構造
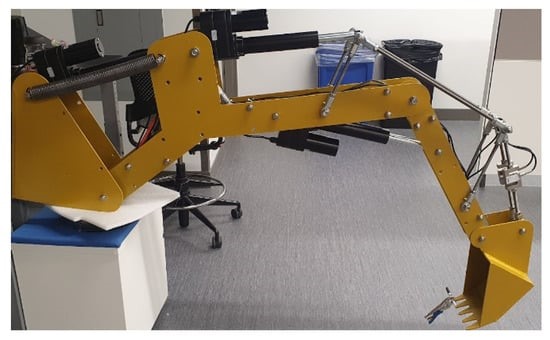
図5 掘削機のマニピュレータ部分
屋内試験では、掘削機を高さ 85 cm に設置し、掘削機を駆動してメイン コンテナから山砂を取り除き、サイド コンテナに移しました。本体容器には透明なアクリルパネルを採用しており、掘削するたびに実際の軌跡と掘削土の表面を比較することができます。深度カメラは、メインコンテナの透明な側から離れた位置に取り付けられ、PC に接続されており、コンテナ内の砂のプロファイルを監視します。 MATLAB R2021a ソフトウェアを使用して、カメラからのセンサー データを後処理します。後処理の最初のステップは、データをキャプチャしてトリミングし、MATLAB のエッジ検出ライブラリを使用して、地面の形状として見られるコンテナ内の砂の輪郭を検出することです。最後のステップでは、高さが最も低いエッジをグラウンド エッジとして選択します。図6に示すように、この方法を使用して砂の表面形状を検出できます。透明なアクリル板に砂が付着している場合、場合によっては、エッジを手作業でトリミングする必要があります。
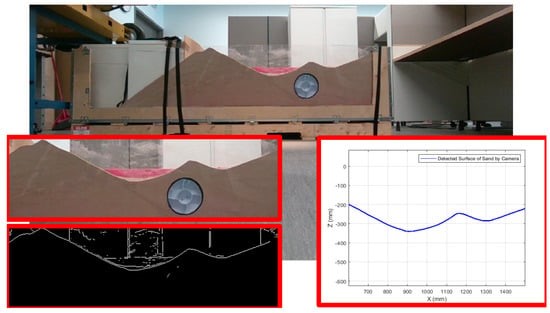
図 6. RGB カメラと MATLAB R2021a ソフトウェアを使用して地面の形状を検出する
2. パス生成とトラッキング制御方法
2.1.パスの生成
この研究では、並列アクチュエータを使用してアクチュエータの負荷を軽減してエネルギーを節約することに加えて、自律型掘削機のエネルギー消費を削減するための最適な経路生成についても検討しています。この目的を達成するために、掘削機のバケットは、2 次元で移動し、単一の軸の周りを回転できる移動ロボットと見なされます。これら 3 つの DOF (自由度) は、ブーム、アーム、バケットのリニア アクチュエータによって制御されます。
障害物は、ユーザーが事前に決定することも、リアルタイム検出方法を使用して検出することもできます。地下物体の存在と位置を検出するには、さまざまな方法が利用可能です。その中でも、地中レーダー (GPR) と電気抵抗率断層撮影法 (ERT) は広く受け入れられています。ただし、これらの技術は実装と運用にコストと時間がかかります。別の研究では、掘削機のバケットに固定された費用対効果の高い磁気センサーを利用して、磁場に基づいて金属パイプと活線を検出して位置を特定しました。移動ロボットのように、ショベルバケットは障害物を避けながら指定された経路に沿って移動します。しかし、エネルギー消費を削減するための適切な経路を作成するために、エネルギー節約はさらなる要素に組み込まれます。
2.2 PSOに基づくパス生成
粒子群最適化 (PSO) は、鳥や魚などの動物の集団行動にヒントを得た計算手法です。探索空間内の粒子の位置と速度を繰り返し調整することで、最適化問題を解決します。 PSO は、探索と活用のバランスをとることで最適なソリューションを見つけることを目指しています。
この研究では、PSO アルゴリズムを利用して、地下の障害物を回避しながら掘削中のエネルギー消費を最小限に抑えることを目的とした最適な経路を生成します。主な目的は、エネルギー消費量を削減し、必要な等高線からの掘削地形の偏差を減らし、地下物体までの距離を長くすることです。
MATLAB シミュレーションの結果は、省エネ PSO ベースの最適化プロセス (図 7) は、地下の障害物を回避し、より近い経路を達成しようとしながら、省エネなしの同じプロセスと比較してエネルギー消費を 18.5% 削減できる (図 8) ことを示しています。希望の地面形状。
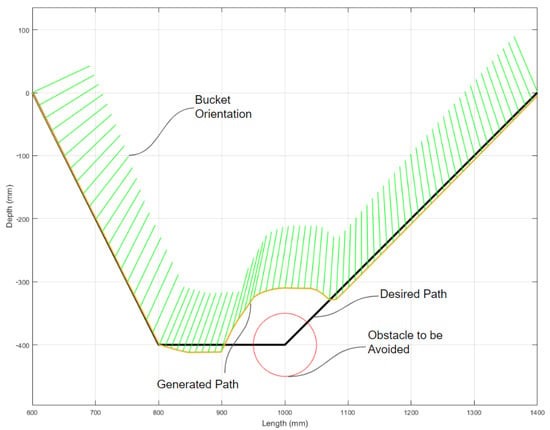
図7 省エネを考慮したパス生成シミュレーション
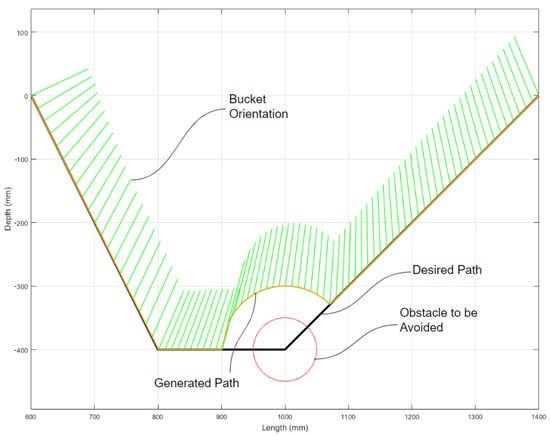
図8 省エネを考慮しないパス生成シミュレーション
2.3 PFM ベースのパス生成
PFM アルゴリズムでは、環境はポテンシャル フィールドとして表現され、ロボットは最小の位置エネルギーでターゲットに到達しようとします。したがって、各反復でロボットは位置エネルギーが最も小さい隣接する位置に移動し、最終的にはこれらの位置を横断することでゴールへの最適な経路を見つけます。
PFM ベースの経路計画では、ロボットはそれを引っ張るターゲットに到達しようとします。実験では全く逆の結果が得られ、ロボットが遠ざけようとした物体がロボットを押しのけました。上記の物体の推力ベクトルの大きさは、物体のサイズによって異なります。最後に、ロボットはこれら 2 つのベクトル (目標点と物体によって生じる力のベクトル) を加算することで方向を選択し、加算されたベクトルの大きさに基づいて速度を選択します。
エネルギー効率の高い動きを実現するために、エネルギー消費の少ない方向にロボットを引っ張る人工物体を構築しました。本研究ではこの人工物体をE物体と呼ぶ。ただし、この E オブジェクトは、ロボットをそれに向かって移動してもロボットとターゲット ポイントの間の距離が増加しない領域に配置する必要があります (図 9)。ロボットの周囲のいくつかの場所から、到達するのに必要なエネルギーが最も少ない場所が E オブジェクトとして選択されます。
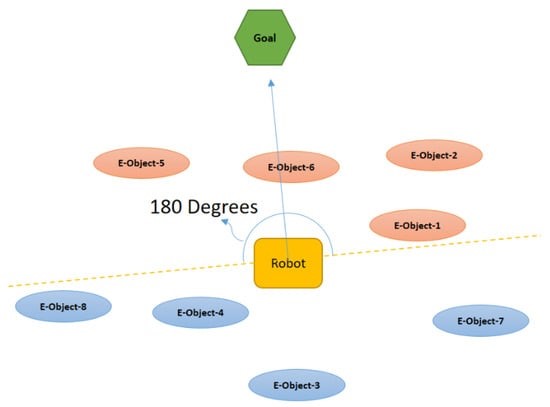
図 9. エネルギー消費を削減する E-Object を作成するための候補ポイント
図 9 は、ロボットと目標点の間の距離を増やさない E オブジェクトを選択する方法を示しています。これらの E オブジェクト (図 9 のオレンジ色の楕円で示されている) に到達するために、ロボットはターゲット ポイントから遠くに移動する必要はありません。図 9 と図 10 では、オレンジ色の候補の中で E オブジェクト 2 の消費エネルギーが最も少ないと仮定します。
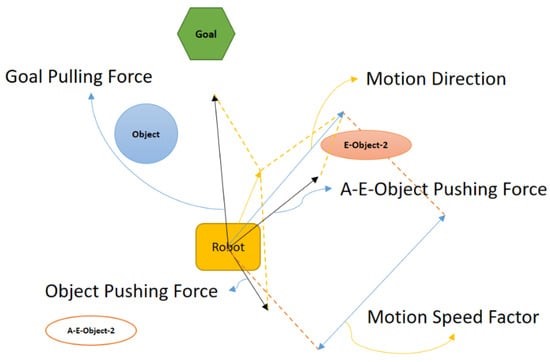
図 10. 省エネ機能を備えた PFM
という基本的な考え方を貫くために、 障害物がロボットを押すPFMにより、ロボットの反対側の同じ距離に人工エネルギー物体(AE-Object-2)が生成されました(図10)。次に、PFM アルゴリズムは、実際のエネルギー障害物と人工エネルギー障害物、および目標点を考慮して、ロボットの速度の方向と大きさを決定します。
一般に、PFM は PSO よりも動的条件への適応性が低くなります。 PSO は粒子群の探査および活用機能を通じて変化する条件に適応できますが、PFM は通常、効果的にナビゲートするために静的モデルを必要とします。
2.4 パストラッキング制御
パス追跡は、パス生成と同様に重要です。これは、エネルギー消費量を最小限に抑え、追跡されたパスと作成されたパスの間の偏差を最小限に抑えて、目的の動作を実現するには、生成されたパスを正確に追跡する必要があるためです。
この研究では、2 つの並列アクチュエータを使用して負荷を分散し、各アクチュエータにかかる応力を軽減する電動自律掘削機を製造するための新しい設計を提案します。電気掘削機は、より少ないエネルギー消費でより多くの力を地面に加えるように設計されています。 PSO および PFM アルゴリズムを採用した提案されたパス生成方法は、製造された掘削機を使用してテストされました。このテストでは、軌道ジェネレーターの種類、コントローラーの種類、省エネモードのステータスに基づいて、5 つの異なるシナリオが検討され、比較されました。
今後の取り組みとして、同じトピックに対処するために適用できるアプローチがいくつか考えられます。たとえば、ベクトル フィールド ヒストグラム (VFH) を使用すると、作成された環境の極ヒストグラムに基づいて、障害物を回避し、目標に向かう可能なナビゲーション方向を決定できます。冒頭で述べたように、ACO (Ant Colony Optimization) も貴重な候補となる可能性があります。さらに、開発されたアルゴリズムは屋内環境での砂掘削でのみテストされました。この制限は、操作性と防水性に欠ける現在の掘削機の設計に起因しています。したがって、将来の展開に備えて、駆動輪と防水カバーを掘削機の設計に組み込む必要があります。この配慮により、シルト、粘土、砂利などのさまざまな材料を使用した屋外環境での実験が可能になります。さらに、この研究では地面の輪郭を監視するために砂場の透明板から離れた場所に設置されたカメラを使用しましたが、これは屋外環境では実用的ではありません。したがって、この問題に対処し、地面の形状を正確に測定するには、ライダーなどの追加のセンサーが必要です。
出典: オンタリオ工科大学オシャワの自動車およびメカトロニクス工学部。

ぜひ読んで、最新情報を入手し、購読してください。ご意見をお聞かせください。
Add: Pudang Village, Xiamei Town, Nan'An City, Quanzhou, Fujian, China




泉州華茂機械設備有限公司 全著作権所有
.  サポートされているネットワーク
サイトマップ
| ブログ
| Xml | プライバシーポリシー
サポートされているネットワーク
サイトマップ
| ブログ
| Xml | プライバシーポリシー


